
Chó Robot Go2 - Ngôi sao sự kiện
Ngày: 14-10-2024Hướng dẫn sử dụng Robot Go2
Ngày: 14-10-2024Hướng dẫn sử dụng Robot Loona
Ngày: 12-10-20245 cách Robot camera trông nhà EBO X có thể bảo vệ gia đình bạn
Ngày: 14-03-2024
Hướng dẫn sử dụng Robot Go2
Thông tin sản phẩm
- Tên sản phẩm: Robot Go2 EDU
- Hãng sản xuất: Unitree
- Thông số kỹ thuật
- Kích thước khi đứng: 70x31x40 cm
- Kích thước khi nằm: 76x31x20cm
- Tốc độ: 0~3.7m/s (MAX ~ 5m/s)
Hướng sử dụng
1. Các bước chuẩn bị và Setup robot
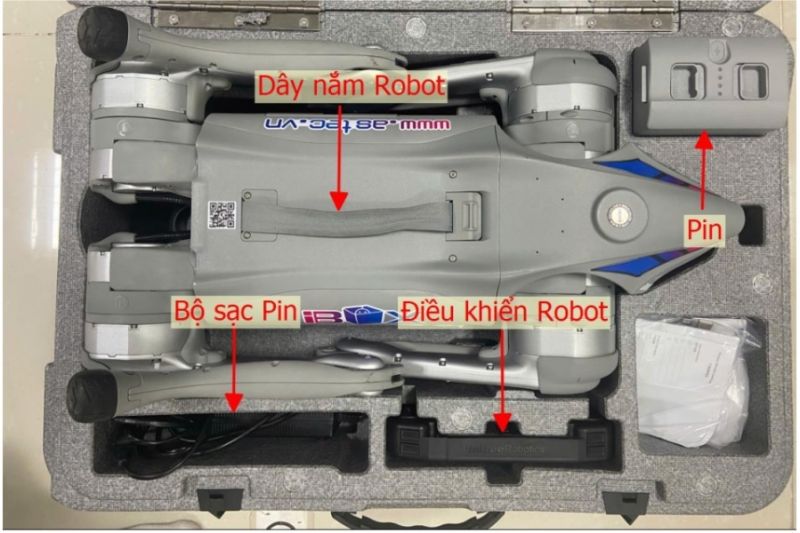
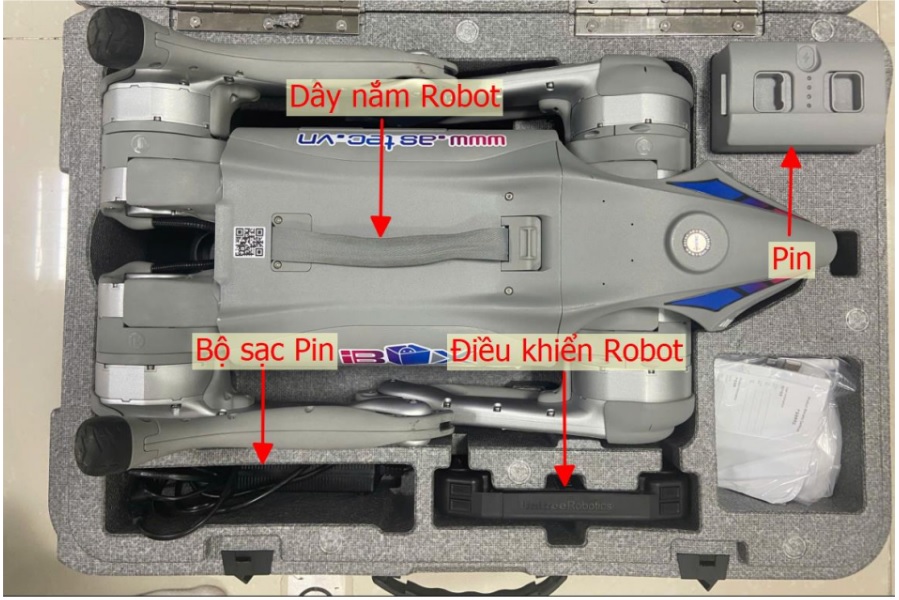
A. Sau khi nhận sản phẩm, tiến hành mở hộp và đưa Robot vào vị trí Setup
B. Setup vị trí các khớp chân robot như hình mô phỏng để bắt đầu khởi động Robo

C. Đưa pin vào khoang pin robot, ấn mạnh tay để các ngàm của pin được khớp vào robot.

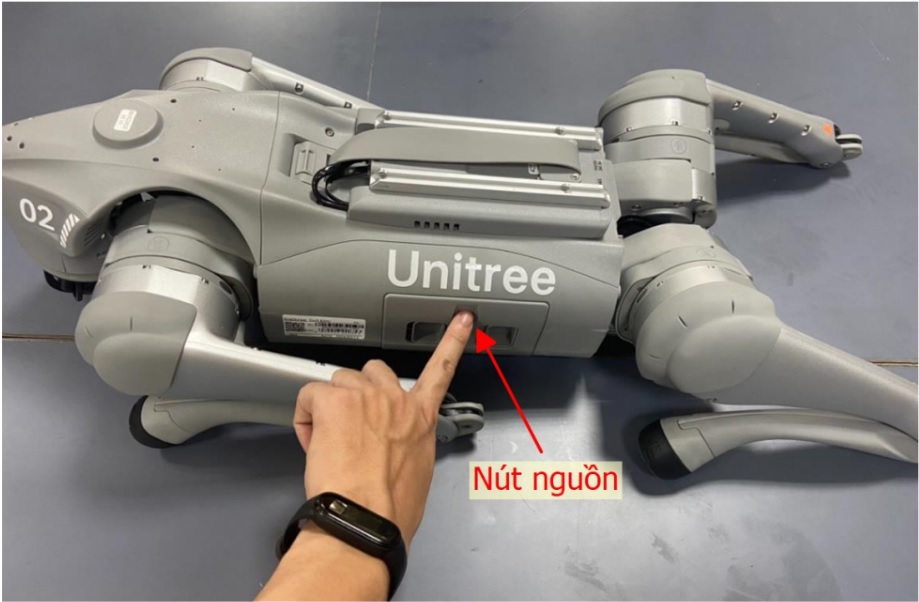
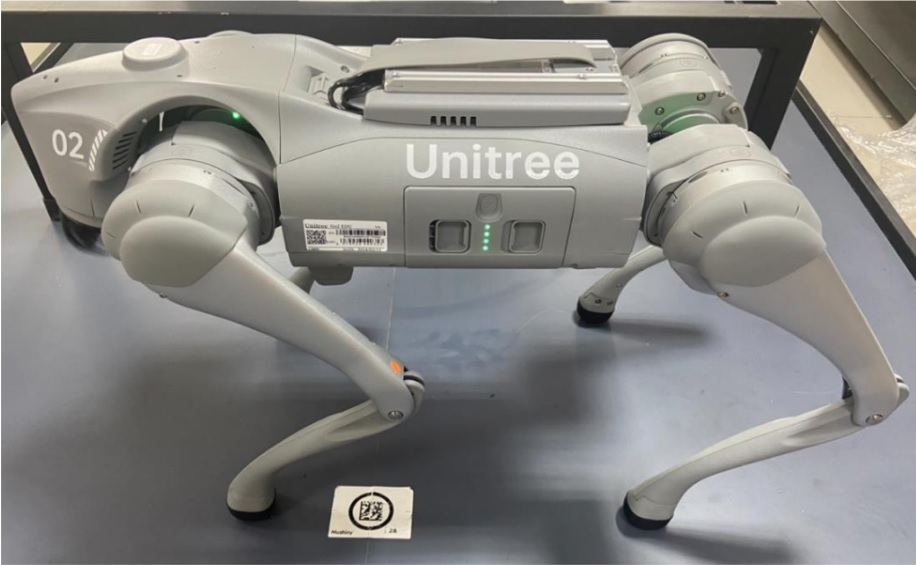
D. Khởi động robot bằng cách, ấn ,nhả một lần nút nguồn, sau đó tiếp tục ấn giữ nút nguồn khoảng 5 giây cho đến khi đèn nguồn robot sáng liên tục. Sau đó đợi khoảng 30 giây cho Robot tự động đứng lên .
E. Tiếp theo chúng ta Setup Điều khiển bằng tay của Robot. Lắp cần gạt điều khiển và khời động tay điều khiển bằng cách ấn ,nhả một lần nút nguồn, sau đó tiếp tục ấn giữ nút nguồn khoảng 5 giây cho đến khi đèn nguồn robot sáng liên tục


Ấn vào nút nguồn của Pin để biết được % pin, mỗi một điểm sáng của Pin thể hiện 25% Pin. Hãy đảm bảo % Pin đủ tốt trước khi Robot hoạt động, như vậy hiệu suất robot vận hành sẽ đảm bảo mức tốt nhất


2. Thao tác điều khiển Robot
A. Bấm nút Start để bắt đầu
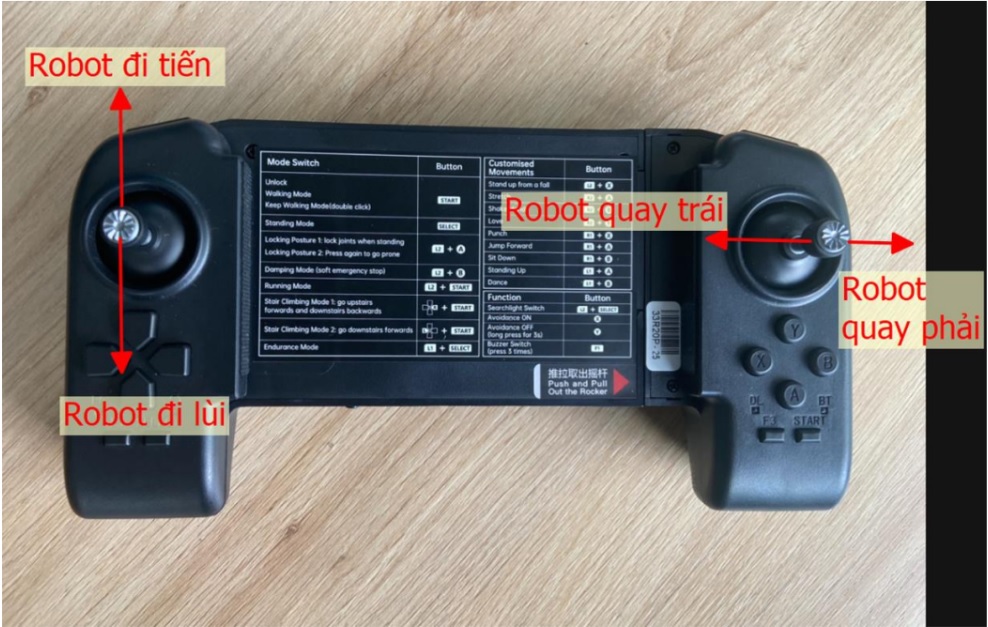
B. Ấn đồng thời các tổ hợp phím để Robot thực hiện các động tác
( Lưu ý: Robot thực hiện xong một động tác thì mới được thực hiện động tác tiếp theo)
L2 + X : Stand up from a fail ( Khi robot bị ngã, tổ hợp phím này sẽ giúp robot đứng dậy )
R2 + A : Stretch – Động tác vươn vai ( Robot thực hiện động tác vươn vai )
R2 + B : Shake hand – Động tác bắt tay ( Robot thực hiện động tác bắt tay)
R2 + Y : Love – Động tác trái tym ( Robot thực hiện động tác tình yêu – trái tym)
R1 + X : Punch – Động tác đứng bằng 2 chân ( Robot thực hiện động tác đứng bằng 2 chân )
R1 + A : Jump Forward – Động tác nhảy xa ( Robot thực hiện động tác nhảy xa)
R1 + B : Sit Down – Động tác ngồi (Robot thực hiện động tác ngồi )
L1 + A : Standing up – Động tác đứng dậy ( Robot thực hiện động tác đứng dậy)
L2 + A : Robot nằm sấp ( Robot thực hiện động tác nằm sấp, dùng trong trường hợp cho robot nghỉ và chuẩn bị tắt robot )
L1 + B : Dance ( Robot thực hiện động tác nhảy múa)
Nút Start : Dùng để khóa hoặc mở khóa robot
L2 + Start : Running Mode ( Robot thực hiện chế độ chạy nhanh)
R + Start : Robot thực hiện chế độ leo cầu thang theo hướng đi lên ( Lưu ý: Độ cao cầu thang từ 16 cm trở xuống mới đảm bảo robot hoạt động được )
Y + Start : Robot thực hiện chế độ xuống cầu thang theo hướng đi xuống ( Lưu ý: Độ cao cầu thang từ 16 cm trở xuống mới đảm bảo robot hoạt động được )
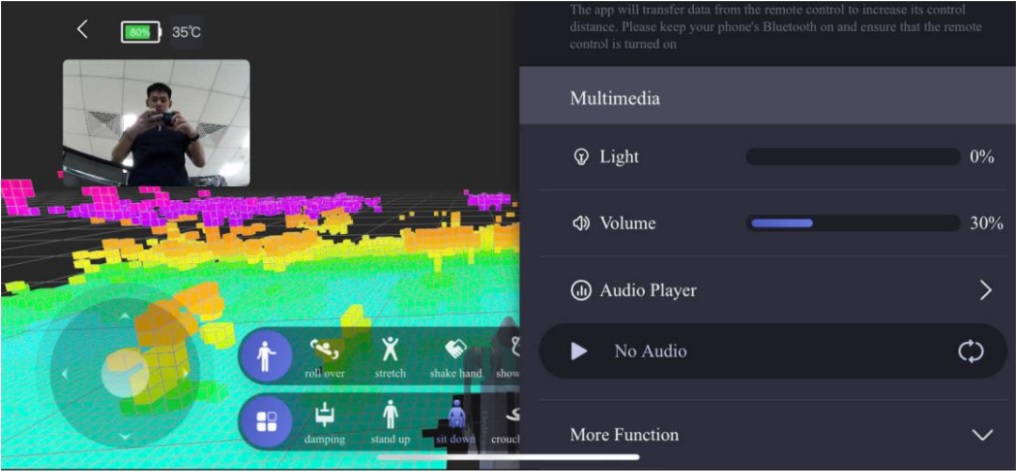
C. Điều khiển Robot thông qua App
Người dùng có thể điều khiển robot thông qua App bằng các thiết bị Smartphone
Tải APP Unitree Go trên Android hoặc iOS
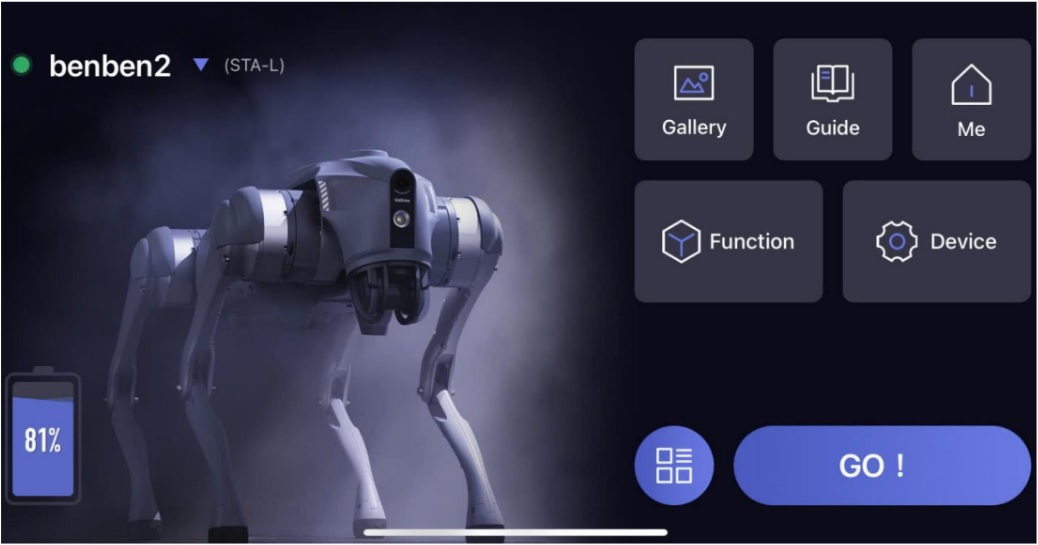
Người dùng kết nối với robot bằng kết nối AP ( một mạng wifi mà robot tự phát ) để kết nối và điều khiển robot ( ưu tiên sử dụng )
Người dùng có thể kết nối Robot với mạng wifi riêng ( STA-L) để có thể điều khiển robot từ xa và yêu cầu robot thực hiện các động tác thông qua giọng nói ( Hãy đảm bảo mạng wifi kết nối được tốt nhất)
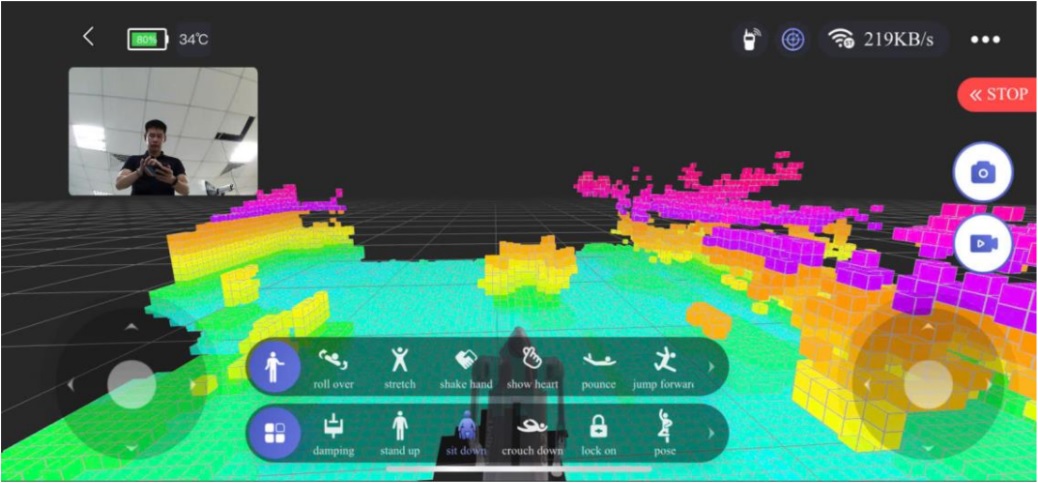
Các hành động của robot được thể hiện sẵn trên màn hình ( Lưu ý: Robot thực hiện xong một động tác thì mới được thực hiện động tác tiếp theo)
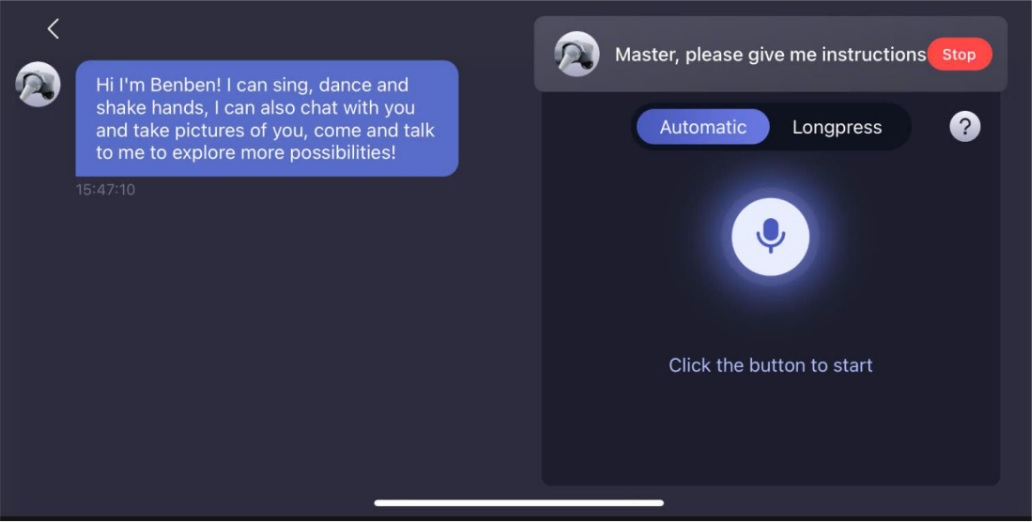
Chúng ta có thể yêu cầu robot thực hiện các động tác thông qua giọng nói
Quay video, chụp ảnh, đèn pin và đàm thoại 2 chiều trên robot
2. Thao tác tắt robot thu dọn robot
Các bước thao tác để tắt robot và thu dọn robot được thực hiện như sau.
A. Bấm tổ hợp phím L2 + A để robot nằm xuống.

Sau khi robot nằm xuống hãy ấn ,nhả một lần nút nguồn, sau đó tiếp tục ấn giữ nút nguồn khoảng 5 giây cho đến khi đèn nguồn robot tắt.

B. Vị trí Robot được sắp xếp vào hộp đựng được bố trí như hình ( Hãy đảm bảo Robot được sắp xếp vị trí đúng như hình vẽ, khi đóng thùng không có hiện tượng kênh hay vướng)

3. Các lưu ý khi sử dụng Robot
- Không để các vật cứng, sắc nhọn chạm vào con quay Ladar nằm tại phần đầu của Robot ( Trong quá trình vận hành hãy chú ý đến trẻ em)

- Không để các vật nặng, vật có khối lượng quá tải trọng lên thân Robot
- Đảm bảo không gian đủ rộng để robot vận hành được tốt nhất. Khoảng 5m2 trở lên
4. Nghiên cứu và phát triển
Người dùng có thể tự nghiên cứu và tích hợp thêm nhiều tính năng tự phát triển thông qua phần mềm hỗ trợ SDK và API cho robot GO2 với phiên bản Edu, edu plus,...cũng như một số sản phẩm.




Thiết kế website bởi aiPlus.vn